Modeling and Calibration Visual Yield Estimates in Vineyards
FSR 2012, CMU Tech Report
Carnegie Mellon University
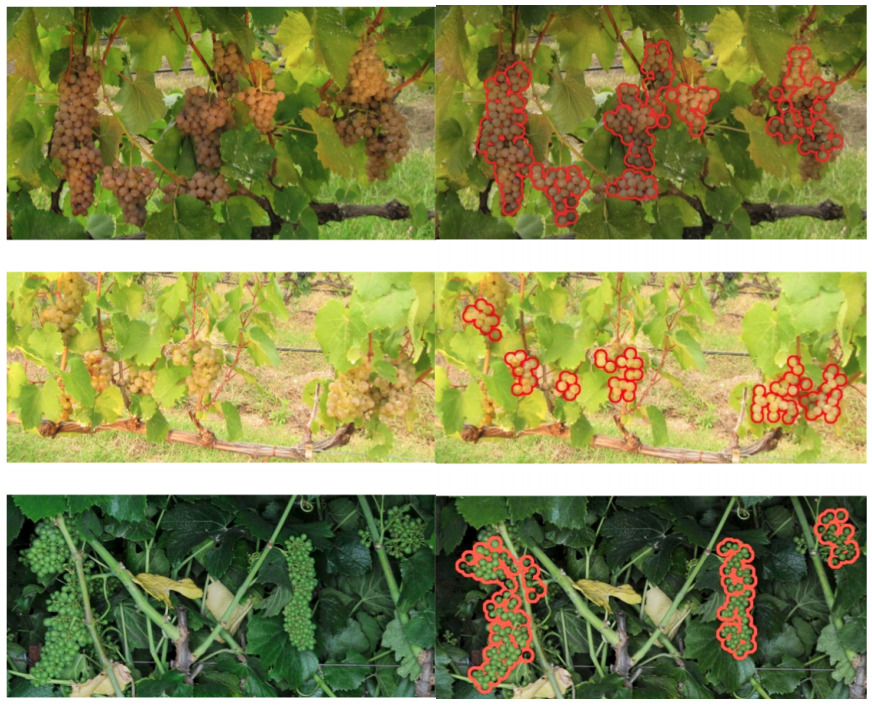
An approach to predict vineyard yield automatically and non-destructively using images collected from vehicles driving along vineyard rows.
Abstract
Accurate yield estimates are of great value to vineyard growers to make informed management decisions such as crop thinning, shoot thinning, irrigation and nutrient delivery, preparing for harvest and planning for market. Current methods are labor intensive because they involve destructive hand sampling and are practically too sparse to capture spatial variability in large vineyard blocks. Here we re- port on an approach to predict vineyard yield automatically and non-destructively using images collected from vehicles driving along vineyard rows. Computer vision algorithms are applied to detect grape berries in images that have been registered together to generate high-resolution estimates. We propose an underlying model relating image measurements to harvest yield and study practical approaches to calibrate the two. We report on results on datasets of several hundred vines collected both early and in the middle of the growing season. We find that it is possible to estimate yield to within 4% using calibration data from prior harvest data and 3% using calibration data from destructive hand samples at the time of imaging.
Cite
@inproceedings{nuske2014modeling,
title={Modeling and calibrating visual yield estimates in vineyards},
author={Nuske, Stephen and Gupta, Kamal and Narasimhan, Srinivasa and Singh, Sanjiv},
booktitle={Field and Service Robotics},
pages={343--356},
year={2014},
organization={Springer}
}
@article{nuske2011visual,
title={Visual yield estimation in vineyards: experiments with different varietals and calibration procedures},
author={Nuske, Stephen and Achar, Supreeth and Gupta, Kamal and Narasimhan, Srinivasa and Singh, Sanjiv},
journal={Robotics Institute, Carnegie Mellon University Technical Report: CMURI-TR-11-39, Dec},
year={2011}
}
Last updated on December 1, 2011