Global pose estimation with limited gps and long range visual odometry
ICRA 2012
Carnegie Mellon University
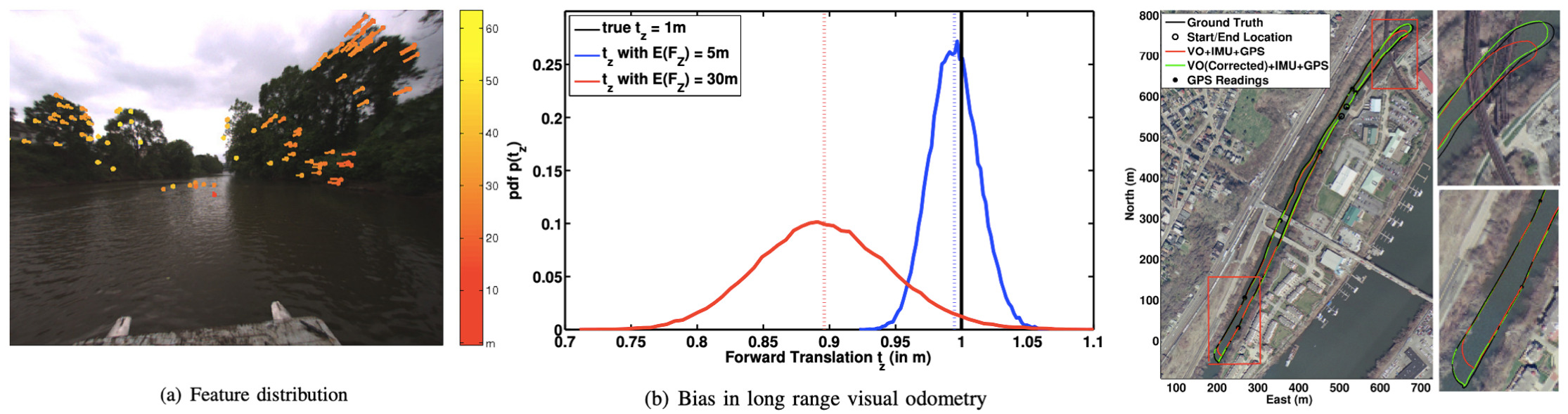
An approach to estimate and correct for the bias in the motion estimate due to a lack of close range features in outdoors when using stereo visual odometry.
Abstract
Here we present an approach to estimate the global pose of a vehicle in the face of two distinct problems;
first, when using stereo visual odometry for relative motion estimation, a lack of features at close range causes a bias in the motion estimate.
The other challenge is localizing in the global coordinate frame using very infrequent GPS measurements.
Solving these problems we demonstrate a method to estimate and correct for the bias in visual odometry and a sensor fusion algorithm capable of exploiting sparse global measurements.
Our graph-based state estimation framework is capable of inferring global orientation using a unified representation of local and global measurements and recovers from inaccurate initial estimates of the state, as intermittently available GPS information may delay the observability of the entire state. We also demonstrate a reduction of the complexity of the problem to achieve real-time throughput.
In our experiments, we show in an outdoor dataset with distant features where our bias corrected visual odometry solution makes a five-fold improvement in the accuracy of the estimated translation compared to a standard approach.
For a traverse of 2km we demonstrate the capabilities of our graph-based state estimation approach to successfully infer global orientation with as few as 6 GPS measurements and with two-fold improvement in mean position error using the corrected visual odometry.
Cite
@inproceedings{rehder2012global,
title={Global pose estimation with limited GPS and long range visual odometry},
author={Rehder, Joern and Gupta, Kamal and Nuske, Stephen and Singh, Sanjiv},
booktitle={2012 IEEE international conference on robotics and automation},
pages={627--633},
year={2012},
organization={IEEE}
}
Last updated on May 14, 2012